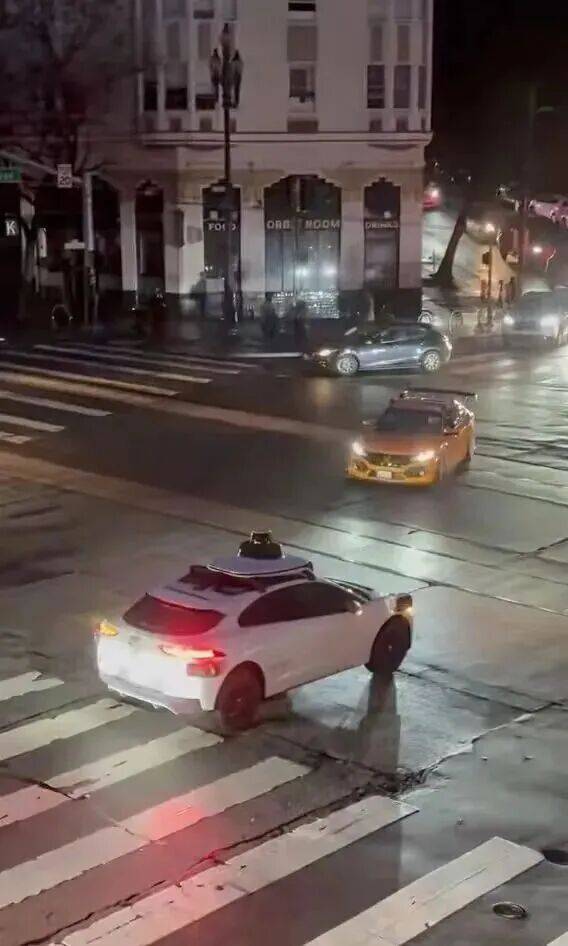
3月31日晚,武汉街头一辆“萝卜快跑”无人驾驶汽车突然平稳停下,双闪灯规律闪烁。这一场景被路人拍下后迅速在社交平台引发热议,有人戏称“科幻片成真了”,也有人质疑技术可靠性。无独有偶,数月前美国旧金山街头也出现过类似场景——Waymo无人车在无事故情况下主动驻停。两次事件背后,折射出公众对自动驾驶技术安全性的复杂认知。
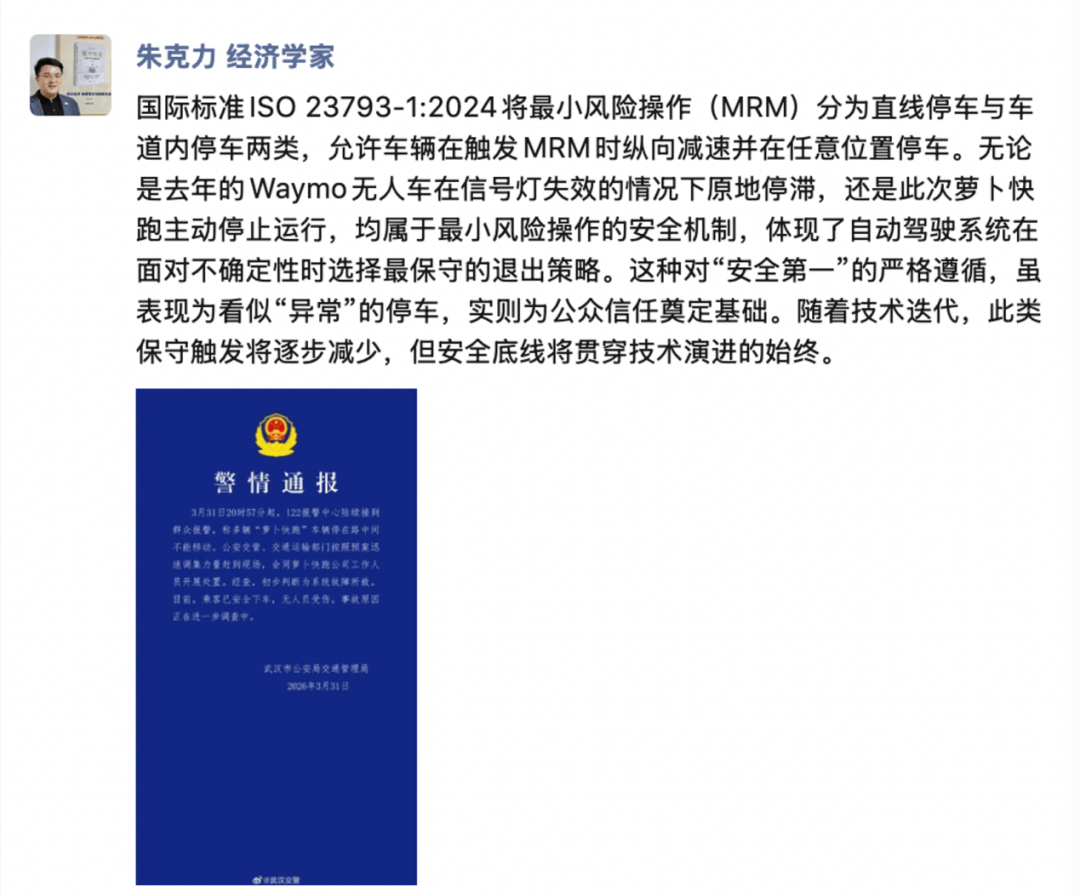
据行业专家解释,此类驻停行为实为自动驾驶系统的“最小风险策略”(MRM)触发机制。当车辆传感器检测到异常信号、环境数据超出预设模型,或系统无法以高置信度判断下一步操作的安全性时,会立即启动保护程序:自动降速、选择安全位置停车并开启双闪警示。这种设计逻辑类似于传统燃油车发动机故障灯亮起时的限速保护,本质是通过主动制动规避潜在风险。
针对“为何不强制靠边”的质疑,技术人员指出,在环境感知数据缺失的情况下,强行变道可能引发二次危险。例如系统无法准确判断右侧车道车流速度时,原地驻停反而比冒险变道更安全。这种“宁停勿撞”的决策逻辑,体现了自动驾驶技术将安全优先级置于通行效率之上的核心原则。
从技术竞争维度观察,全球自动驾驶产业已进入关键攻坚期。美国Waymo公司每周提供45万单全无人服务,累计服务量预计2025年突破2000万单,其运营网络覆盖洛杉矶、旧金山等12个核心城市。国内百度萝卜快跑则在22个城市落地,服务人次超1700万。中美两国在技术路线、测试里程、商业化规模等方面呈现激烈角逐态势,任何技术迭代都可能影响全球产业格局。
公众对自动驾驶的认知仍存在显著分歧。调研显示,63%的受访者担心系统故障风险,但同时有78%的用户认可其减少人为失误的潜力。这种矛盾心态折射出技术普及期的典型特征——既期待创新红利,又恐惧未知风险。专家建议,应建立更透明的技术解释机制,通过真实案例展示系统决策逻辑,逐步构建社会信任基础。
在武汉街头驻停的无人车,其双闪灯的明灭恰似技术文明的指示灯。当系统选择“保守”驻停而非“激进”前行时,展现的不仅是工程设计的严谨性,更是对生命价值的敬畏。这种敬畏之心,或许正是自动驾驶突破“技术奇点”、实现真正安全可靠的关键所在。每一次看似“笨拙”的制动,都在为未来智能交通的稳健前行积累数据与经验。