近日,安徽省在机器人技术领域迎来了一个里程碑式的突破。据合肥发布消息,江淮前沿技术协同创新中心自主研发的绳驱S1机器人,在2025世界机器人大会上惊艳亮相,展现了其独特的魅力和创新实力。
这款安徽首款绳驱S1机器人,全身共设有46个自由度,搭载了激光雷达、毫米波雷达、深度相机、视触觉传感器以及六维力传感器等一系列尖端传感设备。这些高精尖的配置,使得S1机器人能够在多维度场景下实现精准的交互感知,展现出了强大的技术实力。

与传统的刚性臂机器人不同,S1机器人采用了7个自由度的绳驱臂设计。这一创新性的设计,通过在电机与关节之间增加绳索传动,巧妙地利用绳索的柔性震动来消减冲击力,使得末端接触力呈现出递减的趋势。这种设计不仅提高了机器人的安全性,还使得在与人类进行交互时更加温柔、友好。
江淮中心绳驱S1机器人项目的技术负责人田蓥梅表示:“如果说传统的刚性臂是机器人的骨骼,那么绳驱臂就是它的经脉。传统的机械臂通过金属连杆直接传动,力的传递直接而有力,但往往缺乏柔性。而绳驱臂则通过绳索传动,实现了力的柔和传递,这在人机交互中显得尤为重要。”
除了绳驱S1机器人外,江淮中心还自研了一款视触灵巧手,同样在大会上首次亮相。这款灵巧手拥有20个自由度,其中15个为主动自由度,不仅具备弯曲能力,还能进行一定幅度的侧摆运动。其运动灵活性达到了类人水平,能够轻松抓取气球、旋拧瓶盖等。
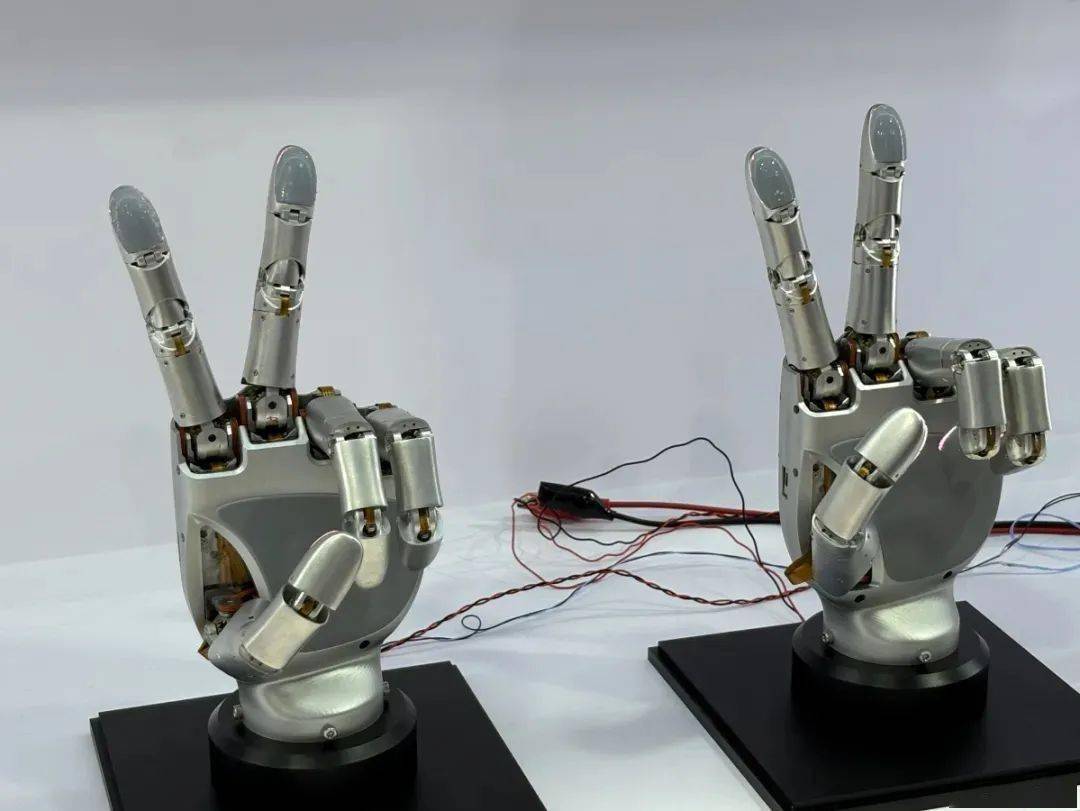
这款灵巧手的指尖设计与人手曲线极为相似,表面覆盖有一层弹性硅胶层。硅胶层内部集成了高分辨率的微型相机,当灵巧手与物体接触时,微型相机能够捕捉到硅胶层的微小变形,从而准确计算出接触位置和接触力等信息。通过先进的算法,灵巧手能够精确把控拿捏物体的力度,即便是抓取豆腐这种易碎物体也能游刃有余。
微型相机还能透过硅胶层捕获物体表面的材质、纹理、硬度等物理属性。甚至在与人类手指触碰时,都能清晰地捕捉到指纹信息。这一创新性的设计,无疑为机器人与人类之间的交互提供了更加精准、安全的可能性。